Биполярный шаговый двигатель
2016-09-02
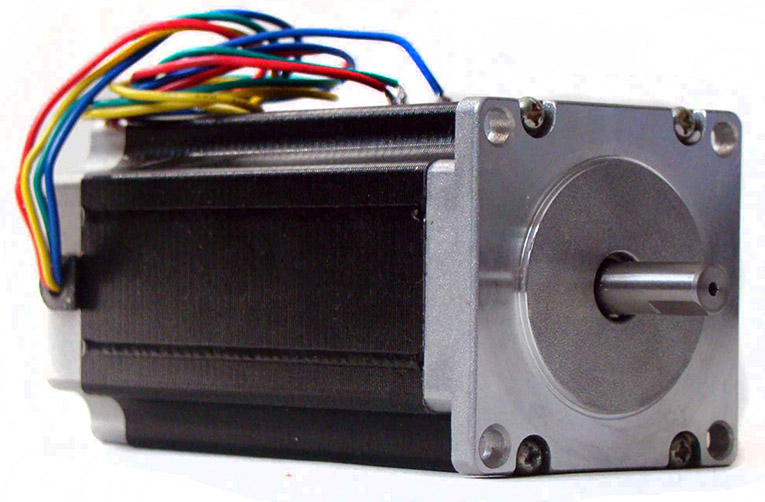
Биполярный шаговый двигатель (ШД) относятся к виду/классу бесколлекторных двигателей непрерывного (постоянного) тока. Как любые бесколлекторные двигатели – ШД имеют большой срок службы и достаточно высокую надежность, что позволяет использовать их в крайне критичных применениях (например, индустриальных).
Сравнение биполярных шаговых двигателей с традиционным двигателем
Если сравнивать шаговые двигатели с традиционными двигателями постоянного тока, то, безусловно, первые требуют более сложных (причем значительно сложных) схем управления, которые в свою очередь должны выполнять, совершенно все коммутации обмоток во время работы двигателя. Кроме того, сам ШД достаточно дорогостоящее устройство, поэтому, где чрезмерно точное позиционирование не требуется, обычные коллекторные двигатели в таких случаях имеют заметное и явное преимущество. Следует отметить, что для управления коллекторными двигателями в последнее время все чаще и чаще применяют специальные контроллеры, практически не уступающие по сложности и восприятию контроллерам ШД.
Преимущества шагового двигателя фрезерного станка с ЧПУ
Одним из основных существенных преимуществ шаговых двигателей, безусловно, является возможность реализовывать точное позиционирование и соответственно регулировку скорости, причем без датчика обратной связи. Данный факт очень важен, потому как эти датчики могут в разы превышать себестоимость самого двигателя. Но это подходит исключительно для систем, работающих при малом ускорении и к тому, же с относительно постоянной нагрузкой. Однако в это же время системы, обладающие обратной связью вполне способны работать с достаточно большими ускорениями, причем, при переменном характере нагрузок. Если нагрузки шагового двигателя превысят его момент, то соответственно информация о положении его ротора теряется, а система требует обязательного базирования с помощью, к примеру, либо концевого выключателя, либо же другого датчика. Таким образом, системы с обратной связью абсолютно не имеют подобного недостатка.
Что выбрать сервомотор или шаговый двигатель
Во время проектирования конкретных систем приходится выбирать между сервомотором и непосредственно шаговым двигателем. Когда требуется точное управление скоростью и прецизионное позиционирование, а скорость и требуемый момент не выходят за дозволенные пределы, то здесь наиболее экономичным решением является, конечно же, ШД. Как и для традиционно-обычных двигателей, для повышения требуемого момента может быть применен понижающий редуктор. Однако в некоторых случаях для шаговых двигателей такой редуктор не всегда приемлем.
В отличие от коллекторных двигателей, у которых момент растет с постоянным увеличением скорости, шаговый двигатель обладает большим моментом на низких скоростях. При этом шаговые двигатели имеют существенно меньшую максимальную скорость, если сравнивать их с коллекторными, что, безусловно, ограничивает максимальное передаточное число и, конечно же, увеличение момента при помощи редуктора.
Использование и применение шагового двигателя
Готовые ШД с редукторами, хотя в настоящее время и существуют, но на сегодняшний день – являются экзотикой. Еще одним значимым фактором, ограничивающим применение редуктора, выражается в присущему ему люфту. Вероятность получения низкой частоты вращения достаточно часто является основной причиной того, что сами разработчики не в силах спроектировать качественный редуктор, используют шаговые двигатели НЕоправданно часто. При этом коллекторный двигатель обладает более высокой удельной мощностью, весьма низкой стоимостью и достаточно простой схемой управления. А одновременно с одноступенчатым червячным редуктором коллекторный двигатель способен обеспечить такой же диапазон скоростей, как и непосредственно – шаговый двигатель. Ко всему прочему, при всем этом обеспечивается существенно больший момент.
Приводы на основании коллекторных двигателей весьма и весьма часто используются в технике военного предназначения, что косвенно доказывает их отличные параметры качества и высокую надежность. В современных автомобилях, бытовой технике, промышленном оборудовании коллекторные двигатели достаточно сильно распространены. Но, тем не менее, шаговые двигатели имеют свою хоть и довольно узкую, но эффективно впечатляющую сферу применения, где они – просто незаменимы!


